GPS-ontvanger installeren |
Nadat u de GPS-ontvanger correct heeft aangesloten en werkend heeft, kunt u nog enkele instellingen wijzigen via .
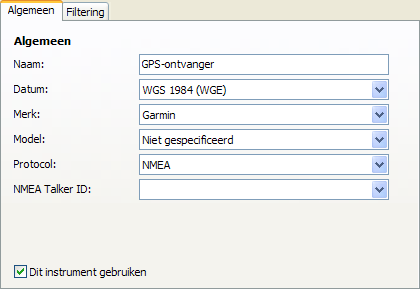
Tabblad Algemeen
- Bij Naam kunt u de naam van de GPS-ontvanger wijzigen, zoals die in het instrumentbeheer wordt genoemd.
- Datum geeft aan op welke kaartdatum de GPS-ontvanger staat ingesteld. WinGPS 5 heeft deze nodig om de juiste positie op het scherm te kunnen bepalen. Wanneer in het programma een andere kaartdatum wordt gebruikt dan in de GPS-ontvanger, kan de getekende GPS-positie afwijken van de werkelijke positie. De afstand kan hierbij oplopen tot wel enkele honderden meters. Tegenwoordig werken de meeste GPS-ontvangers met de WGS 1984-kaartdatum. Raadpleeg de handleiding van de GPS-ontvanger om na te gaan welke kaartdatum de ontvanger gebruikt.
- Merk is met name belangrijk voor het uploaden en downloaden van gegevens van en naar de GPS, omdat daarvoor vaak specifieke communicatie-instellingen nodig zijn. Staat uw merk GPS-ontvanger niet in de lijst kies dan Standaard NMEA.
- Bij Model kunt u het specifieke model aangeven. Dit is belangrijk wanneer u gegevens naar de GPS-ontvanger wilt up- en downloaden, omdat er ook tussen verschillende modellen van hetzelfde merk verschillen kunnen zijn in de manier waarop de ontvanger moet worden aangesproken om gegevens te kunnen verwerken.
- Protocol Er zijn GPS-ontvangers die GPS-gegevens volgens verschillende protocollen kunnen versturen. U kunt hier aangeven welk protocol WinGPS 5 moet gebruiken om met de GPS-ontvanger te communiceren.
- Bij NMEA Talker ID wordt door middel van twee karakters aangegeven van wat voor apparaat het NMEA-bericht is ontvangen, de zogenaamde Talker ID. U kunt hier bepalen van welk apparaat je GPS-berichten wilt ontvangen, door de overeenkomstige Talker ID te selecteren. Heeft u maar één apparaat dat GPS-berichten stuurt dan kunt u dit veld leeg laten. WinGPS zal dan alle binnenkomende GPS-berichten gebruiken.
- Bij Dit instrument gebruiken kunt u aangeven of u dit instrument ook daadwerkelijk wilt gebruiken.
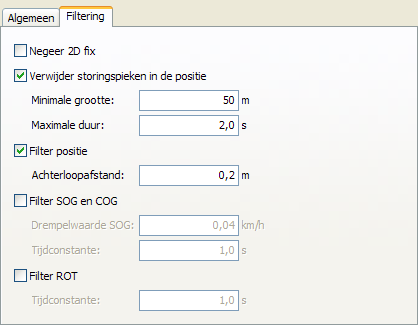
Tabblad: Filtering
Zet, indien nodig, bij het GPS-filter aan om de koers, snelheid en positie te dempen en storingspulsen op te vangen. Vooral aan te raden bij GPS’en met Sirf3 chips die bij stilstand en lage snelheid een onrustig beeld hebben. Nadeel van het dempen is dat zowel de positie als de snelheidsvector in beperkte mate achter gaan lopen. Ook aan te raden als u de ankerwacht gebruikt en niet gewekt wil worden door stoorpulsen.
- Negeer 2D fix: een GPS-ontvanger heeft aan 3 satellieten voldoende om een 2-dimensionale positie te kunnen berekenen. De foutmarge bij een 2D fix is vrij groot en dus is het mogelijk om een 2D fix te negeren, door deze optie te gebruiken.
- Verwijder storingspieken in de positie: door een van buiten komende storing kan de ontvangen positie tijdelijk sterk afwijken van de werkelijke positie. Dit is dan terug te zien aan het gevaren traject als een storingspiek en de DOG wordt onrealistisch verhoogd. Door deze optie te gebruiken worden storingspieken van meer dan de bij ingevulde afstand en die korter duren dan de bij ingevulde tijdsduur uit het signaal gefilterd.
- Filter positie: dit snelheidsafhankelijke positie filter zorgt er voor dat uw positie niet meer dan de bij ingevulde afstand achterloopt. Als u voor anker ligt is de snelheid bijna nul en is de positiedemping groot, bij toenemende snelheid wordt de positiedemping steeds minder.
- Filter SOG en COG: bij kunt u een waarde opgeven waaronder de snelheid nul wordt gemaakt, zodat de DOG bij lage snelheid niet onnodig oploopt. U kunt de snelheid over de grond (SOG) en koers over de grond (COG) ook filteren. Omdat er bij stilstand geen grondkoers is, kan de grondvector op het scherm door storing alle kanten opdraaien. Met dit filter kan de grondvector stabieler worden gemaakt. Bovendien levert dit een rustiger beeld op bij het gebruik van de Head Up of Course Up volgmodus. Voor het filteren geeft u een op. Hoe hoger de waarde hoe meer er gefilterd wordt.
- Bij Filter ROT kunt u de voorspelde Rate of Turn filteren. Voor het filteren geeft u een Tijdconstante op. Hoe hoger de waarde hoe meer er gefilterd wordt.
Wij adviseren om alle filters aan te zetten op de standaard vooraf door ons ingevulde waardes. Uiteraard kunt u dat altijd wijzigen maar noteer dan eerst wat de waarde was voor u die wijzigt. U kunt dan altijd terug naar de standaardwaarde.
De GPS-ontvanger in WinGPS 5 ondersteunt de volgende NMEA-berichten: GGA, GLL, GSA, GSV, RMC en VTG. (zie Glossary 'Verklarende woordenlijst')
Voor het aansluiten zie ook de door de fabrikant geleverde instructies.
[ Zie ook: downloaden vanaf de GPS en uploaden van WinGPS naar GPS ]